
Note: This website (moonviews.com) has not been regularly updated since 2014. Now that the project’s data has been submitted to NASA, this website will no longer be updated but will be maintained as an online archive of the LOIRP’s prior activities. Thank you for your interest in – and support of – our project.
LOIRP Images Are Now Online at The National Archives

Lunar Orbiter images processed by the Lunar Orbiter Image Recovery Project are now online at the National Archives. Link
LOIRP Imagery and Data Available on NASA Planetary Data System

The Lunar Orbiter Image Recovery Project Online Data Volumes were published online for public access by NASA at the Planetary Data System Cartography and Imaging Sciences Node on 31 January 2018. You can access all of the imagery recovered by LOIRP here:
https://pds-imaging.jpl.nasa.gov/volumes/loirp.html.
LOIRP Completed
The Lunar Orbiter Image Recovery Project has ended. Final data was delivered to NASA in April 2017. McMoons (Building 596) has been vacated and the Lunar Orbiter tapes have been archived in another building at NASA ARC. Building 596 itself is likely to be demolished in the near future. The tape drives were donated to the Library of Congress several years ago. In 2017 the LOIRP Project received a NASA Ames Group Achievement Award and the Ordway Award for Sustained Excellence in Spaceflight History from the American Astronautical Society. Further information on this project will likely be available from NASA SSERVI here.

High Resolution Lunar Orbiter Imagery Online at NASA SSERVI

A collection of high resolution images from Lunar Orbiters I – V retrieved by the Lunar Orbiter Image Recovery Project (LOIRP) are now online at NASA’s Solar System Research Virtual Institute. NASA will be updating this website periodically with new imagery.
Stunning Remastered View of Europa
 Scientists have produced a new version of what is perhaps NASA’s best view of Jupiter’s ice-covered moon, Europa. The mosaic of color images was obtained in the late 1990s by NASA’s Galileo spacecraft. This is the first time that NASA is publishing a version of the scene produced using modern image processing techniques. An earlier, lower-resolution version of the view, published in 2001, featured colors that had been strongly enhanced. The new image more closely approximates what the human eye would see. Space imaging enthusiasts have produced their own versions of the view using the publicly available data, but NASA has not previously issued its own rendition using near-natural color.
Scientists have produced a new version of what is perhaps NASA’s best view of Jupiter’s ice-covered moon, Europa. The mosaic of color images was obtained in the late 1990s by NASA’s Galileo spacecraft. This is the first time that NASA is publishing a version of the scene produced using modern image processing techniques. An earlier, lower-resolution version of the view, published in 2001, featured colors that had been strongly enhanced. The new image more closely approximates what the human eye would see. Space imaging enthusiasts have produced their own versions of the view using the publicly available data, but NASA has not previously issued its own rendition using near-natural color.
More
Earliest Satellite Images of Antarctica
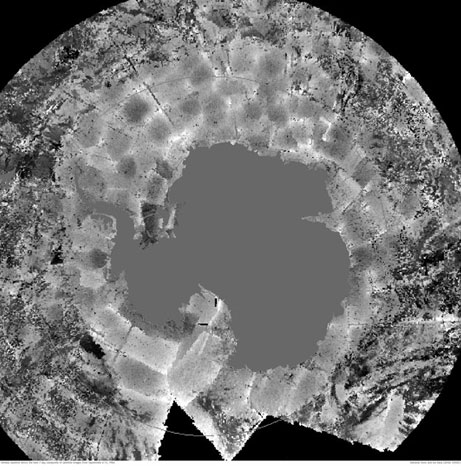
Long-lost images taken from the first Nimbus satellite are revealing new information about what the world looked like from space before the beginning of the modern-day satellite record in 1979. While NASA never really lost the data (it was stored in federal archives) they did lose the ability to access it for nearly 40 years. Recovered images of Antarctica showed a greater extent of sea ice than ever measured before by scientists–but the record was short lived. In an odd twist of fate, the new record was broken in September 2014, only weeks after the discovery.
The Surveyor Digitization Project

Image: This image of Earth was captured by Surveyor 7 in 1968. The image, stored on a 70 millimeter film reel negative, also contains calibration metadata. NASA / JPL-Caltech / University of Arizona Lunar and Planetary Laboratory
“It’s hard to believe, but just three years before Neil Armstrong and Buzz Aldrin walked on the moon in 1969, humanity had yet to soft-land anything there. If the United States was really going to put astro-boots on the ground, it would be nice to get a preliminary look at the surface. In 1964 and 1965, three camera-equipped spacecraft called Ranger crash-landed into the moon, giving scientists their first up-close look. The Soviet Union’s Luna 9 gently touched down in the Ocean of Storms in February 1966, becoming the first spacecraft to send home images from the surface. Four months later, the U.S. followed suit with Surveyor 1, the first of seven robotic spacecraft sent to investigate Luna firma between 1966 and 1968. Two didn’t make it in one piece, but of the five that did, some 87,000 images were relayed back to Earth via television cameras. Astonishingly, less than two percent of those images have ever been seen. That’s according to a team of scientists at the University of Arizona Lunar and Planetary Laboratory (LPL), which plan to bring Surveyor’s unseen work to light. The group, led by Dr. Shane Byrne, will digitize the entire collection and release it into the public domain.”
More at Planetary Society: “Surveyor Digitization Project Will Bring Thousands of Unseen Lunar Images to Light”
Crowdsourcing a Century of Astronomical History

“The project, called Digital Access to a Sky Century at Harvard (DASCH for short), is actually a collaboration between the Harvard College Observatory and the Smithsonian Institution, the latter of which has embarked on a much larger endeavor to crowdsource the transcription of millions of pages of archival material. The DC-based network of museums launched a beta version of its crowdsourcing platform in June 2013, and over the next year about 1,000 volunteers transcribed 13,000 pages of documents. After emerging from beta in August and opening up to the public, that volunteer list has swelled to over 4,000. Though it isn’t the first archival institution to begin digitizing its collected works — everyone from the New York Public Library to the British Museum have launched similar initiatives — its scope of work is arguably the most massive; there are 137 million objects spread across the Smithsonian’s 19 museums.”
More at “Why Harvard and the Smithsonian teamed up to crowdsource a century of astronomical history”
NASA Lists ISEE-3 Reboot as 2nd Largest Crowdfunded Space Effort
 Emerging Space: The Evolving Landscape of 21st Century American Spaceflight, PDF, NASA Office of the Chief Technologist
Emerging Space: The Evolving Landscape of 21st Century American Spaceflight, PDF, NASA Office of the Chief Technologist
“Crowdfunding offers space organizations avenues for fundraising outside traditional institutional methods. Sites like Kickstarter.com, Rockethub.com, and Indiegogo.com allow space companies to tap the financial resources of private citizens interested in space exploration. In addition to providing crucial funds for the companies, crowd funding allows citizens to directly engage in space exploration by funding the projects that interest them. The number of these projects continues to grow. Table 4 provides a few prominent examples known at the time of printing. … ISEE-3, a NASA probe launched in 1978, became the first spacecraft in deep space to be operated by a private-sector organization thanks in part to a crowd funding campaign.”
Note: When you add ISEE-3 Reboot Project ($160K) and Lunar Orbiter Image Recovery Project ($62K) together (both conducted by the same team) over $222,000 has been raised via crowdfunding. Click on image to enlarge.
Video: Digital Amnesia (Bregtje van der Haak, VPRO)
“Our memory is dissipating. Hard drives only last five years, a webpage is forever changing and there’s no machine left that reads 15-year old floppy disks. Digital data is vulnerable. Yet entire libraries are shredded and lost to budget cuts, because we assume everything can be found online. But is that really true? For the first time in history, we have the technological means to save our entire past, yet it seems to be going up in smoke. Will we suffer from collective amnesia?”
The Lunar Orbiter Image Recovery Project is featured starting at 17:15. This segment was filmed in early 2014.
Photos From a Visit to McMoons
Cara McCormick visited McMoons recently. According to her Twitter account (@caramccee) she is an “Independent archivist, specializing in analog sound, video and photograph preservation. Interested in digital storytelling, music and all things history.”
More of her photos from the visit are here.